




 Unboxed")
")









MIT Develops Algorithm To Help Robots Predict Human Movements

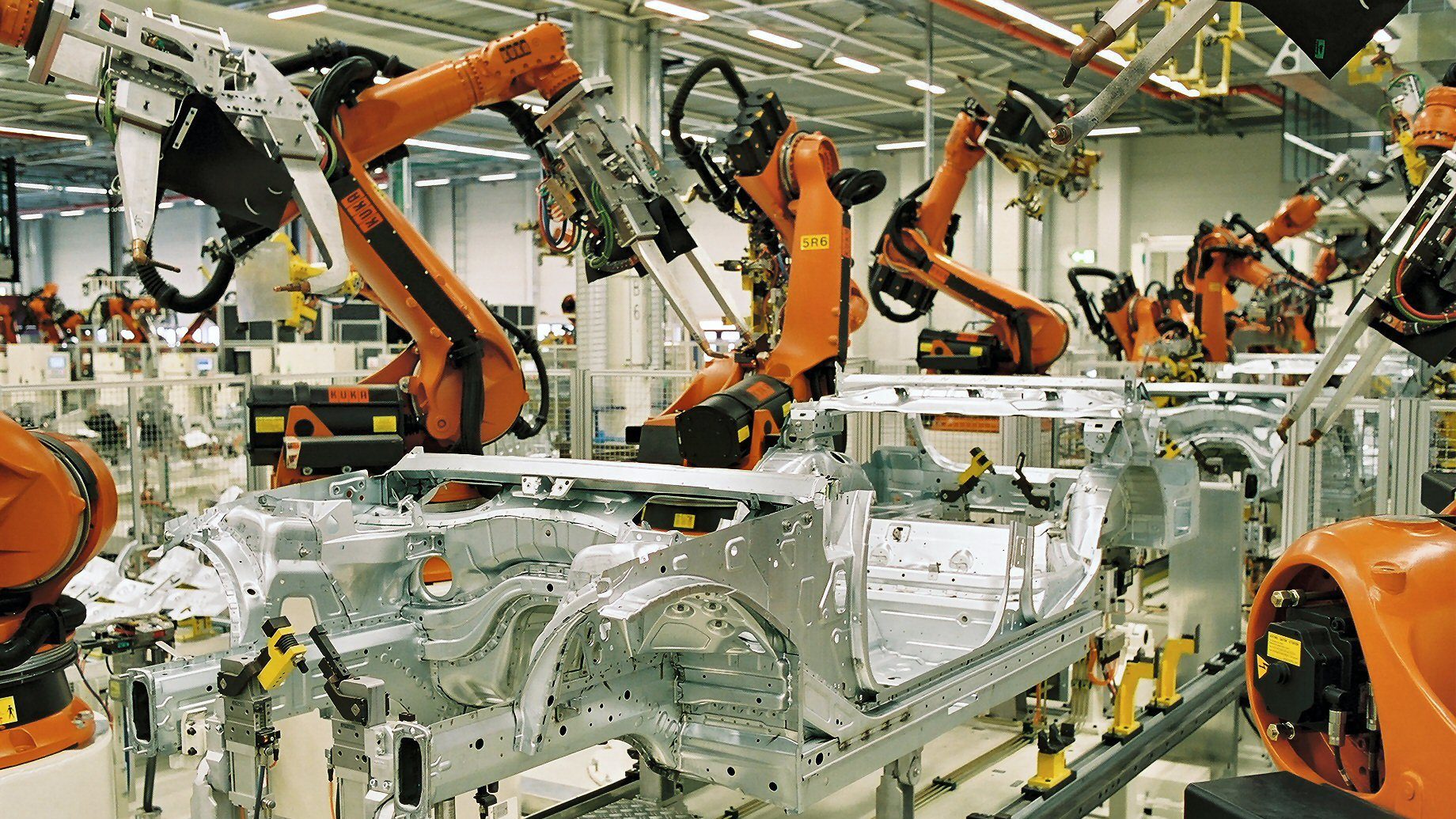
Robots and humans are capable of functioning in close proximity to each other. For instance, in factories, robots assemble the moving parts of a machine, while the human workforce is responsible for transporting different parts between workstations. However, some hindrances might lead to unexpected slowdowns, consequently reducing the efficiency of the whole system. Hence, researchers at MIT have designed an algorithm that can predict where humans will go next.
In the year 2018, MIT researchers and BMW automobiles were testing ways where humans and robots could collaborate to speed up car assemblies. In such an instance, robots were programmed to pause momentarily whenever a human passes close by. However, it was noted that the robots would literally freeze and held their state for a long time instead of resuming their functions. Such unnecessary pauses would translate to a huge loss in efficiency. The researchers at MIT came up with a solution for the same.
The team discovered that the major problem lies in the robot’s trajectory alignment algorithms. The pre-fed algorithms could accurately predict a human’s future movements, but the major limitation resided in its ability to predict how long would a person take to move to any point in the predicted path. A new algorithm was developed by the MIT research team which anticipates the timing of a person’s motion in addition to guessing his/her movements. When the algorithm was applied, it was derived that the robot became much more responsive than before. Instead of freezing in place when someone walked by, the robot simply rolled out of the way and resumed later.
 Also Read: Samsung Launches The 292 Inch, 8K Wall Luxury TV
Also Read: Samsung Launches The 292 Inch, 8K Wall Luxury TV
Julie Shah, a member of the team stated that the algorithm mimics human motion to such an extent that the robot can understand and monitor pauses in natural movement. The results of the latest studies and research will be presented at the Robotics: Science and Systems conference in Germany.





